Antonello Venturino
Ingegnere Informatico
Dott. Ric. in Ing. dell'Automazione
P. IVA IT03538320791
Paesi di studio/lavoro




Università/Aziende




Curriculum Vitae
Formazione
09/2019 - 09/2022
Université Paris-Saclay (L2S/CentraleSupélec e ONERA)Parigi, Francia

Dottorato (Europeo) in Ing. dell'Automazione
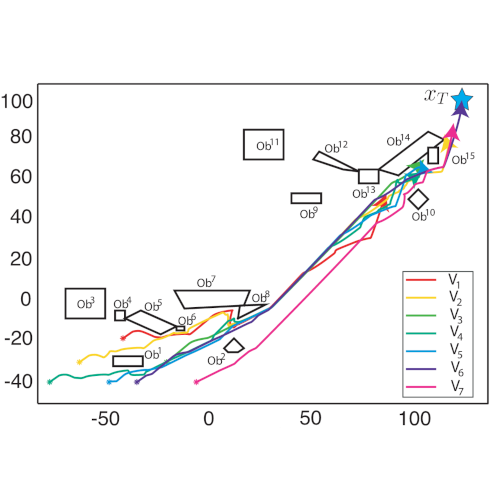
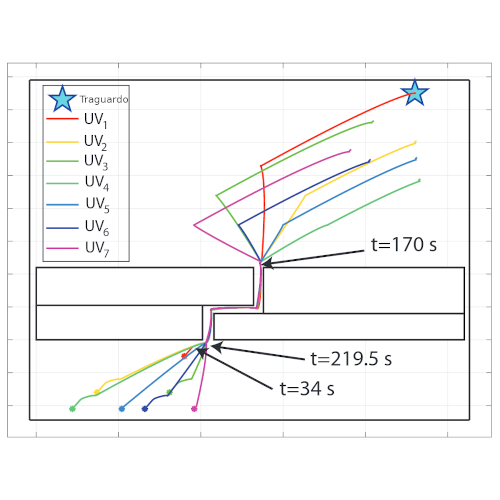
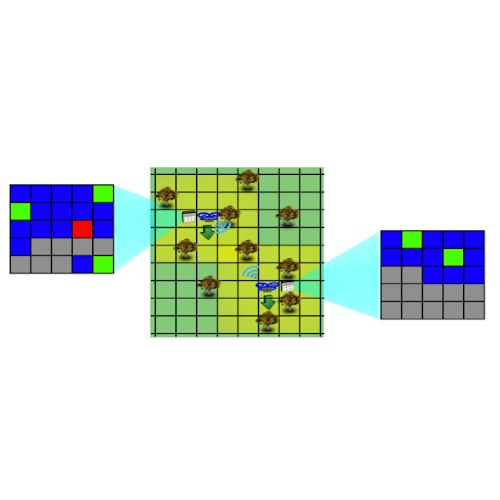
Tesi in Stima dello stato distribuita e vincolata per missioni di sorveglianza usando sistemi multi-sensori multi-robot. Nello stesso periodo ho svolto attività di tutoraggio e supervisioni di studenti di corsi magistrali per automazione e robotica.
04/2021 - 07/2021
Universidad de SevillaSiviglia, Spagna
Dottorato in Ing. dell'Automazione - Mobilità Internazionale
Periodo di 3 mesi di scambio culturale per approfondire alcuni algoritmi di risoluzione di problemi di ottimizzazione. Il periodo mi serve anche come abilitazione al titolo di Dottorato Europeo.
10/2016-04/2019
Università della CalabriaRende, Italia
Laurea Magistrale in Ing. dell'Automazione
Votazione finale 110/110 con lode. Il corso copriva argomenti di base per automazione fino a tecniche più avanzate come controllo predittivo, gestore del riferimento, veicoli autonomi, ecc. Con tanto di progetti simulati e/o sperimentati.
Tesi: Una strategia di controllo predittiva distribuita per flotte di veicoli autonomi operanti in ambienti incerti.
09/2013-09/2016
Università della CalabriaRende, Italia
Laurea Triennale in Ing. Informatica
Votazione finale: 101/110. Corsi classici di Ing. Informatica, da programmazione ad Ing. dei Programmi (del "Software", in inglese), con orientamento all'automazione e alla robotica.
Tesi: Strumenti di realtà virtuale per la teoria del controllo e la robotica.
Esperienza professionale
02/11/2022 - 31/03/2023
NATO STO Centre for Maritine Research and Experimentation, La Spezia, Italia
Ricercatore
Ricerca sulla stima dello stato, rilevamento di ciber-attacchi e anomalie sui sistemi ciber-fisici applicati alle flotte di navi militari.
Dal 2016
Libero ProfessionistaIngegnere Informatico
Progettazione e sviluppo di servizi Web ed estensioni piattaforme in PHP e MySQL.
01/07/2019 - 27/09/2019
E-Shock S.R.L Milano, Italia
Ingegnere dell'Automazione per l'Autoveicolo
Progetto di 3 mesi per un sistema di inclinazione idraulico per tricicli a motore. Mi sono occupato della progettazione e implementazione di un sistema per rilevazione e diagnosi di guasti su sensori e della supervisione dei piloti per le prove su strada.
01/09/2018 - 29/12/2018
Concordia University Montreal, CanadaTirocinio di Ricerca
Ricerca per tesi magistrale su controllo di formazione di flotte di veicoli a guida autonoma in ambienti incerti.
2006 - 2017
Lavoro occasionale, autonomoSviluppatore Web
Sviluppo di estensioni per CMS di commercio elettronico, come integrazioni con gestionali, servizi di pagamento virtuali, ecc.