
Antonello Venturino
Ingegnere Informatico
Dott. Ric. in Ing. dell'Automazione
P. IVA IT03538320791
Archivi
Stima distribuita dello stato a orizzonte recedente per rete di sensori a basse capacità computazionali

Sommario: questo articolo si concentra sulla stima distribuita dello stato per una rete di sensori che osserva un sistema lineare a tempo discreto. La soluzione fornita si basa su un algoritmo di Stima Distribuita dello Stato a Orizzonte Recedente che considera un osservatore Luenberger di pre-stima nella formulazione del problema locale risolto da ogni sensore….
Una strategia di controllo predittivo distribuito per sistemi multi-veicolo vincolati che si muovono in ambienti sconosciuti
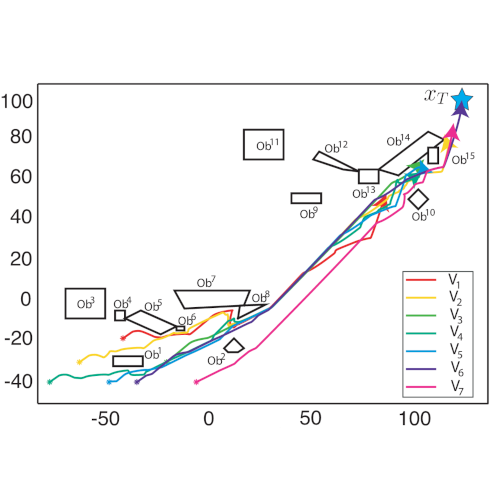
Sommario: in questo articolo, proponiamo una strategia di controllo predittivo distribuita per una flotta di veicoli che si muove in uno scenario di ostacoli sconosciuti. In particolare, combiniamo argomenti quali controllo ad orizzonte recedente e formazioni comandante-seguace al fine di progettare un’architettura flessibile in cui la topologia del veicolo, se necessario, può essere riorganizzata per…
Stima dello stato distribuita a orizzonte recedente con osservatore pre-stima
Sommario: questo articolo propone un nuovo algoritmo di Stima a Orizzonte Recedente Distribuita per la stima dello stato di un sistema lineare a tempo discreto tramite una rete di sensori. Il contributo principale consiste nell’utilizzo di un osservatore di Luenberger di pre-stima nella formulazione del problema locale da risolvere per ogni sensore. Questo si traduce…
Una flessibile strategia di controllo distribuita per flotte di veicoli che si muovono in scenari con ostacoli stretti
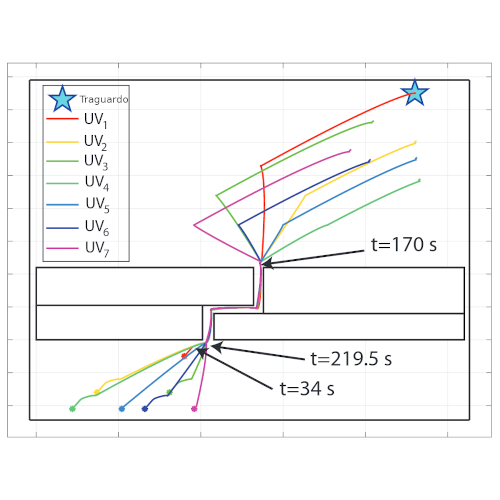
Sommario: in questo articolo, è stato sviluppato uno schema di controllo predittivo distribuito per affrontare il problema di evitare gli ostacoli per un gruppo di veicoli terrestri autonomi che si muovono in ambienti sconosciuti e planari. La strategia proposta sfrutta un’architettura di controllo a commutazione in cui la formazione del veicolo può essere convenientemente organizzata…
Supporto DRONI in Agricoltura di precisione per la lotta contro i parassiti
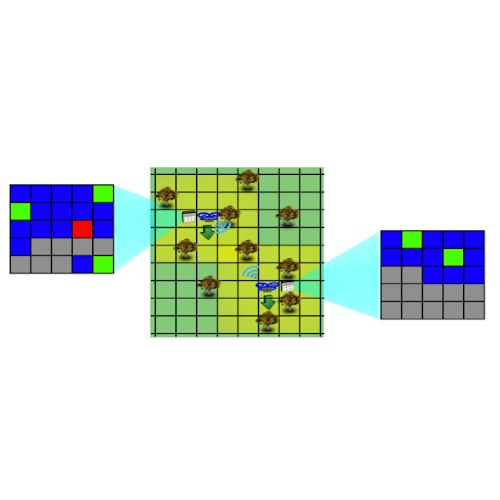
Sommario: in questo articolo si indaga sul supporto dei droni nel dominio dell’agricoltura di precisione. In questi ultimi anni, le nuove tecnologie consentono agli operatori del settore di far fronte a diverse minacce come parassiti e sbalzi climatici che possono degradare gravemente la coltura o la qualità dei prodotti coltivati. L’utilizzo di simulatori a questo…