
Antonello Venturino
Ingegnere Informatico
Dott. Ric. in Automatica
P. IVA IT03538320791
Pubblicazioni
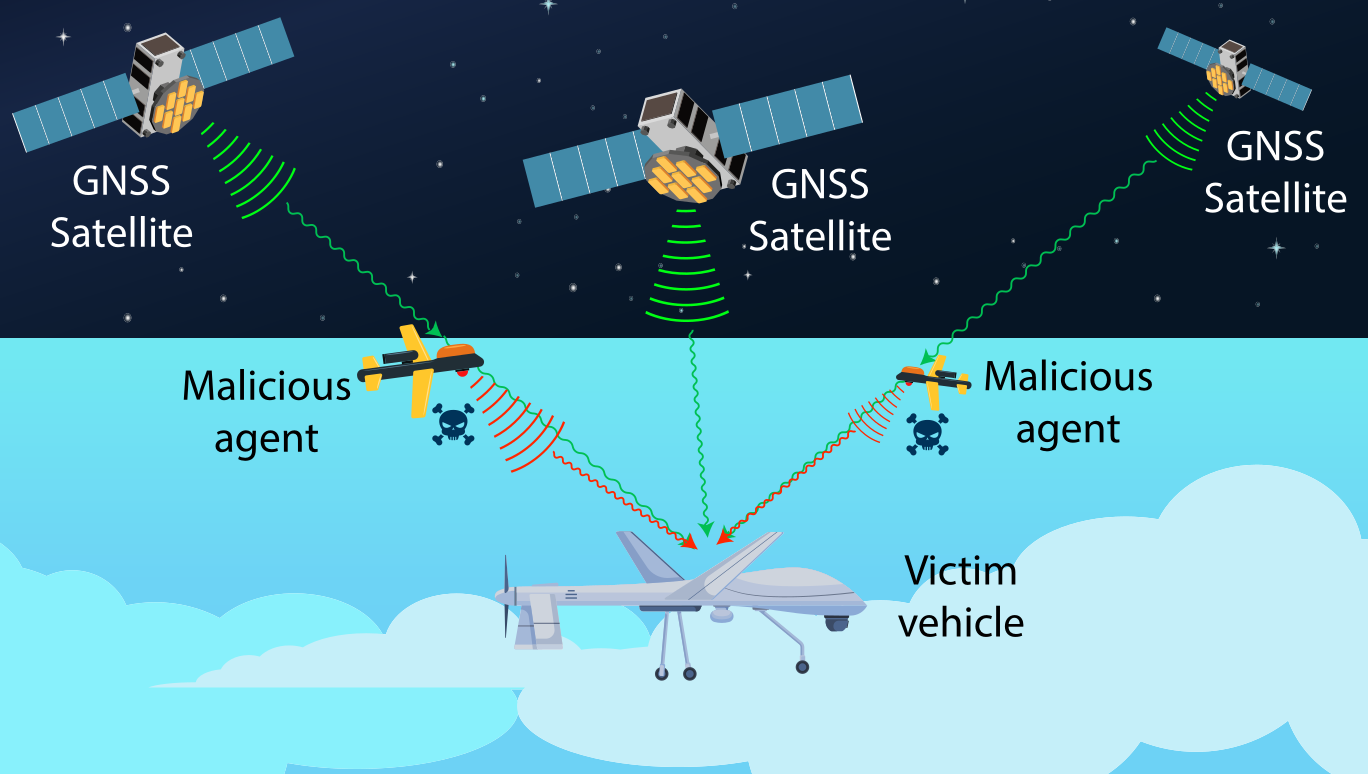
A. Venturino, E. d'Afflisio, N. Forti, P. Braca, P. Willett and M. Z. Win, "Adaptive Resilience Navigation Filter for Detecting and Mitigating Multi-Spoofing Attacks in Range-Based Localization Systems using Antenna Arrays," in IEEE Transactions on Aerospace and Electronic Systems, doi: 10.1109/TAES.2025.3534422.
Rivista
A. Venturino, L. Filice, G. Mezzatesta, F. Tedesco and G. Franzè, "Coordination of fleets of autonomous vehicles for logistics operations in industrial environments: a grid based receding horizon control approach," TechRxiv, December 10, 2024, doi: https://doi.org/10.36227/techrxiv.173386516.60845320/v1.
Rivista
A. Venturino, L. Filice and G. Franzè, "Grid-Based Receding Horizon Control for Unicycle Robots Under Logistic Operations," 2024 IEEE 29th International Conference on Emerging Technologies and Factory Automation (ETFA), Padova, Italy, 2024, pp. 1-7, doi: 10.1109/ETFA61755.2024.10710915.
Convegno
A. Venturino, E. d’Afflisio, N. Forti, P. Braca, P. Willett and M. Z. Win, "Adaptive Resilience in Navigation: Multi-Spoofing Attacks Defence with Statistical Hypothesis Testing and Directional Receivers," 2024 27th International Conference on Information Fusion (FUSION), Venice, Italy, 2024, pp. 1-8, doi: 10.23919/FUSION59988.2024.10706399.
Convegno
D. Famularo, G. Franzè, F. Tedesco and A. Venturino, "Leader-Follower Formations Subject to False Data Injections: A Resilient Distributed Model Predictive Approach," 2023 62nd IEEE Conference on Decision and Control (CDC), Singapore, 2023, pp. 2054-2059, doi: 10.1109/CDC49753.2023.10384294.
Convegno
A. Venturino, C. Stoica Maniu, S. Bertrand, T. Alamo, and E. F. Camacho, "Multi-vehicle localization by distributed MHE over a sensor network with sporadic measurements: Further developments and experimental results," in Control Engineering Practice, 132, 105410, 2023, doi: 10.1016/j.conengprac.2022.105410.
Rivista
A. Venturino, S. Bertrand, C. S. Maniu, T. Alamo and E. F. Camacho, "Multi-Vehicle System Localization by Distributed Moving Horizon Estimation over a Sensor Network with Sporadic Measurements," 2022 IEEE Conference on Control Technology and Applications (CCTA), Trieste, Italy, 2022, pp. 595-600, doi: 10.1109/CCTA49430.2022.9966151.
Convegno
A. Venturino, S. Bertrand, C. Stoica Maniu, T. Alamo and E. F. Camacho, "A New ℓ-step Neighbourhood Distributed Moving Horizon Estimator," 2021 60th IEEE Conference on Decision and Control (CDC), Austin, TX, USA, 2021, pp. 508-513, doi: 10.1109/CDC45484.2021.9682837.
Convegno
A. Venturino, C. Stoica Maniu, S. Bertrand, T. Alamo, and E. F. Camacho, "Distributed moving horizon state estimation for sensor networks with low computation capabilities," Syst. Theor. Control Comput. J., vol. 1, no. 1, pp. 81–87, Jun. 2021, doi: 10.52846/stccj.2021.1.1.14.
Rivista
A. Venturino, S. Bertrand, C. S. Maniu, T. Alamo and E. F. Camacho, "Distributed moving horizon estimation with pre-estimating observer," 2020 24th International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 2020, pp. 174-179, doi: 10.1109/ICSTCC50638.2020.9259766.
Convegno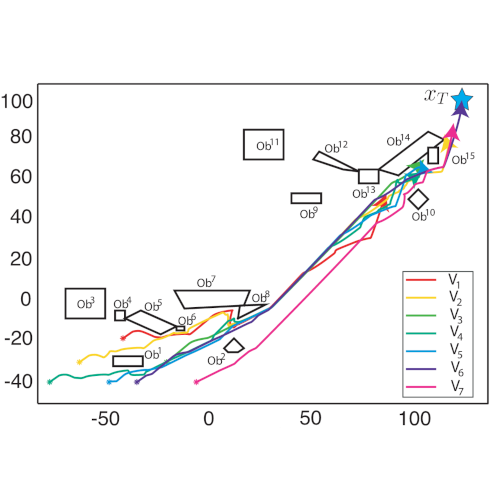
G. Franzè, W. Lucia and A. Venturino, "A Distributed Model Predictive Control Strategy for Constrained Multi-Vehicle Systems Moving in Unknown Environments," in IEEE Transactions on Intelligent Vehicles, vol. 6, no. 2, pp. 343-352, June 2021, doi: 10.1109/TIV.2020.3029746.
Rivista
C. Stoica Maniu, C. Vlad, T. Chevet, S. Bertrand, A. Venturino, G. Rousseau, and S. Olaru, "Control systems engineering made easy: Motivating Students through experimentation on UAVs," in IFAC 2020-21st IFAC World Congress.
Convegno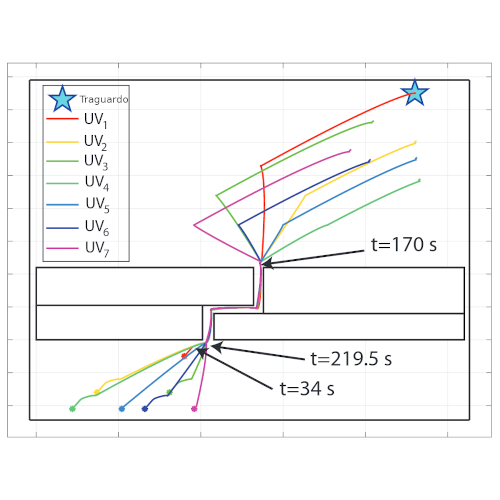
A. Venturino and W. Lucia, "A Flexible Distributed Control Strategy for Teams of Vehicles Moving within Severe Obstacle Scenarios," 2019 24th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Zaragoza, Spain, 2019, pp. 941-946, doi: 10.1109/ETFA.2019.8869313.
Convegno
G. Potrino, N. Palmieri, V. Antonello and A. Serianni, "Drones Support in Precision Agriculture for Fighting Against Parasites," 2018 26th Telecommunications Forum (TELFOR), Belgrade, Serbia, 2018, pp. 1-4, doi: 10.1109/TELFOR.2018.8611876.
Convegno